3. Transform and Roll Out¶
We will finally put everything together in this notebook to implement the famious Transformer model.
3.1. Helper Files¶
Download these files and place them in the same directory as the current notebook before you start.
from IPython.display import FileLink, FileLinks
FileLink('plots_transformer.py')
FileLink('util.py')
FileLink('replay.py')
3.2. Imports¶
import copy
import numpy as np
import torch
import torch.optim as optim
import torch.nn as nn
import torch.nn.functional as F
from torch.utils.data import DataLoader, Dataset, random_split, TensorDataset
from plots_transformer import *
from util import *
We need PositionalEncoding, subsequent_mask and EncoderDecoderSelfAttn that we built earlier. They are copied here for clarity and completeness, and demonstrating when they are needed, but for better software engineering, you should consider putting them in a separate .py file, so they can be imported.
3.3. Narrow Attention¶
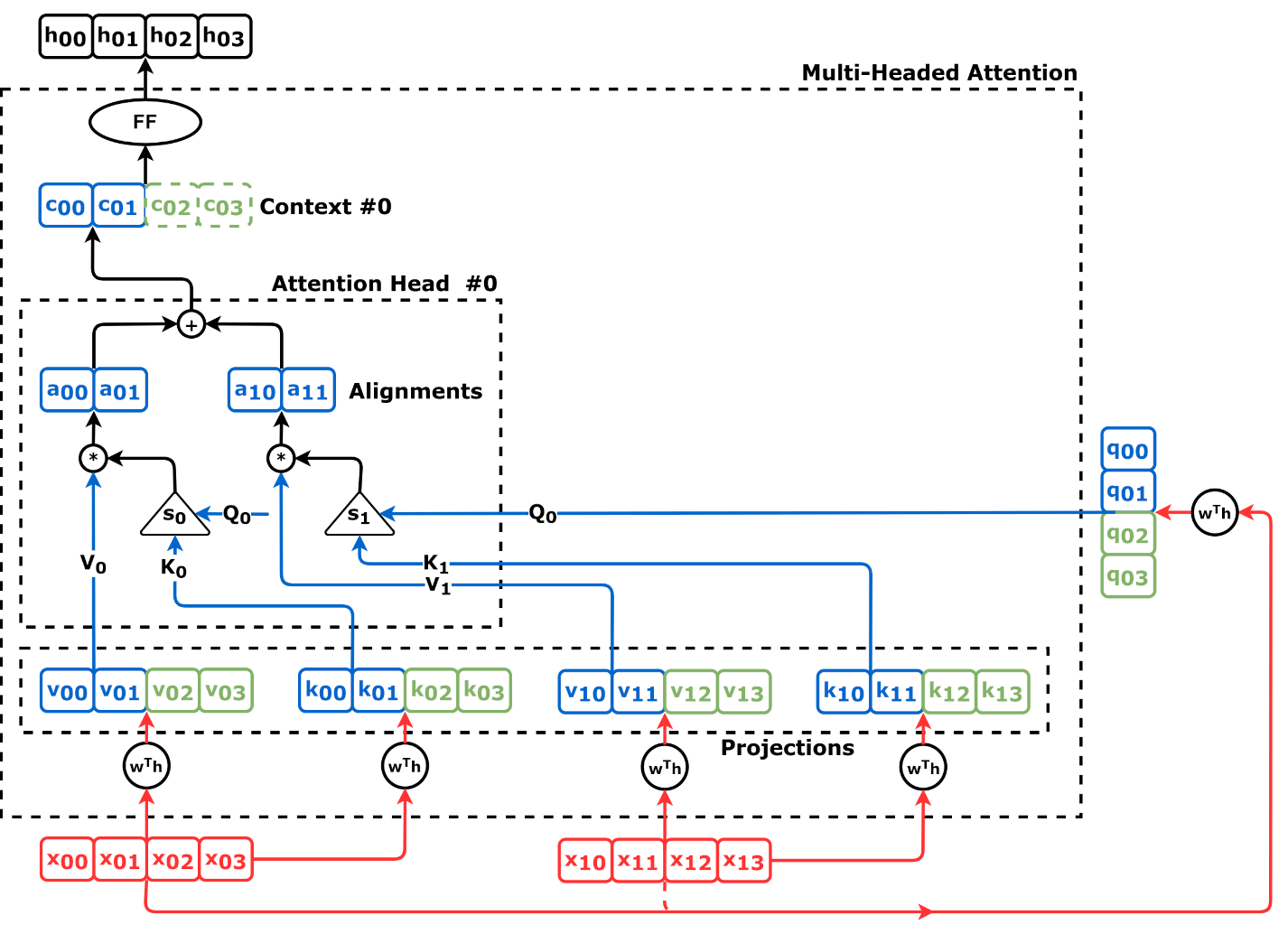
3.3.1. Multiheaded Attention¶
class MultiHeadedAttention(nn.Module):
def __init__(self, n_heads, d_model, dropout=0.1):
super(MultiHeadedAttention, self).__init__()
self.n_heads = n_heads
self.d_model = d_model
self.d_k = int(d_model / n_heads)
self.linear_query = nn.Linear(d_model, d_model)
self.linear_key = nn.Linear(d_model, d_model)
self.linear_value = nn.Linear(d_model, d_model)
self.linear_out = nn.Linear(d_model, d_model)
self.dropout = nn.Dropout(p=dropout)
self.alphas = None
def make_chunks(self, x):
batch_size, seq_len = x.size(0), x.size(1)
# N, L, D -> N, L, n_heads * d_k
x = x.view(batch_size, seq_len, self.n_heads, self.d_k)
# N, n_heads, L, d_k
x = x.transpose(1, 2)
return x
def init_keys(self, key):
# N, n_heads, L, d_k
self.proj_key = self.make_chunks(self.linear_key(key))
self.proj_value = self.make_chunks(self.linear_value(key))
def score_function(self, query):
# scaled dot product
# N, n_heads, L, d_k x # N, n_heads, d_k, L -> N, n_heads, L, L
proj_query = self.make_chunks(self.linear_query(query))
dot_products = torch.matmul(proj_query,
self.proj_key.transpose(-2, -1))
scores = dot_products / np.sqrt(self.d_k)
return scores
def attn(self, query, mask=None):
# Query is batch-first: N, L, D
# Score function will generate scores for each head
scores = self.score_function(query) # N, n_heads, L, L
if mask is not None:
scores = scores.masked_fill(mask == 0, -1e9)
alphas = F.softmax(scores, dim=-1) # N, n_heads, L, L
alphas = self.dropout(alphas)
self.alphas = alphas.detach()
# N, n_heads, L, L x N, n_heads, L, d_k -> N, n_heads, L, d_k
context = torch.matmul(alphas, self.proj_value)
return context
def output_function(self, contexts):
# N, L, D
out = self.linear_out(contexts) # N, L, D
return out
def forward(self, query, mask=None):
if mask is not None:
# N, 1, L, L - every head uses the same mask
mask = mask.unsqueeze(1)
# N, n_heads, L, d_k
context = self.attn(query, mask=mask)
# N, L, n_heads, d_k
context = context.transpose(1, 2).contiguous()
# N, L, n_heads * d_k = N, L, d_model
context = context.view(query.size(0), -1, self.d_model)
# N, L, d_model
out = self.output_function(context)
return out
dummy_points = torch.randn(16, 2, 4) # N, L, F
mha = MultiHeadedAttention(n_heads=2, d_model=4, dropout=0.0)
mha.init_keys(dummy_points)
out = mha(dummy_points) # N, L, D
out.shape
torch.Size([16, 2, 4])
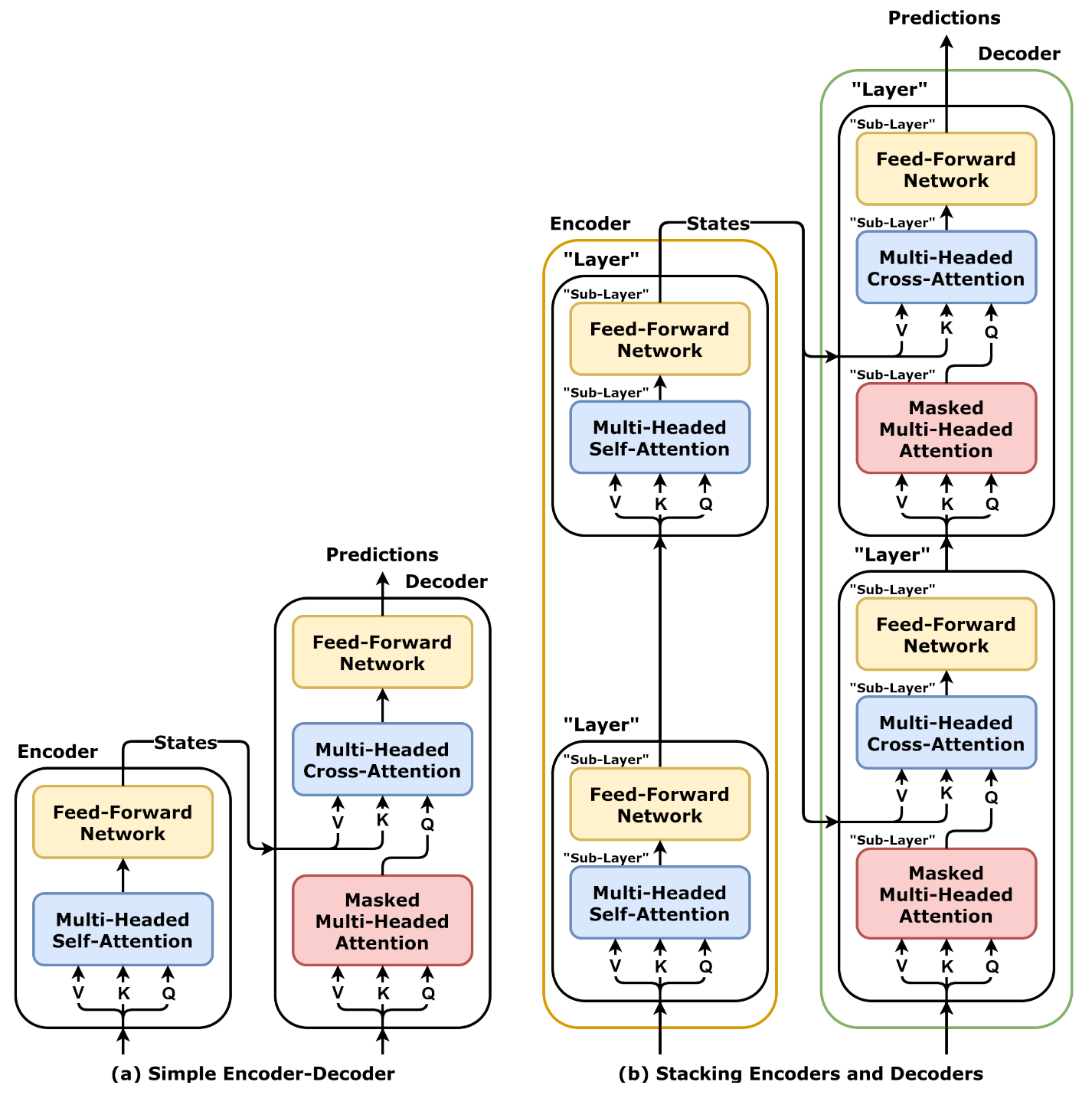
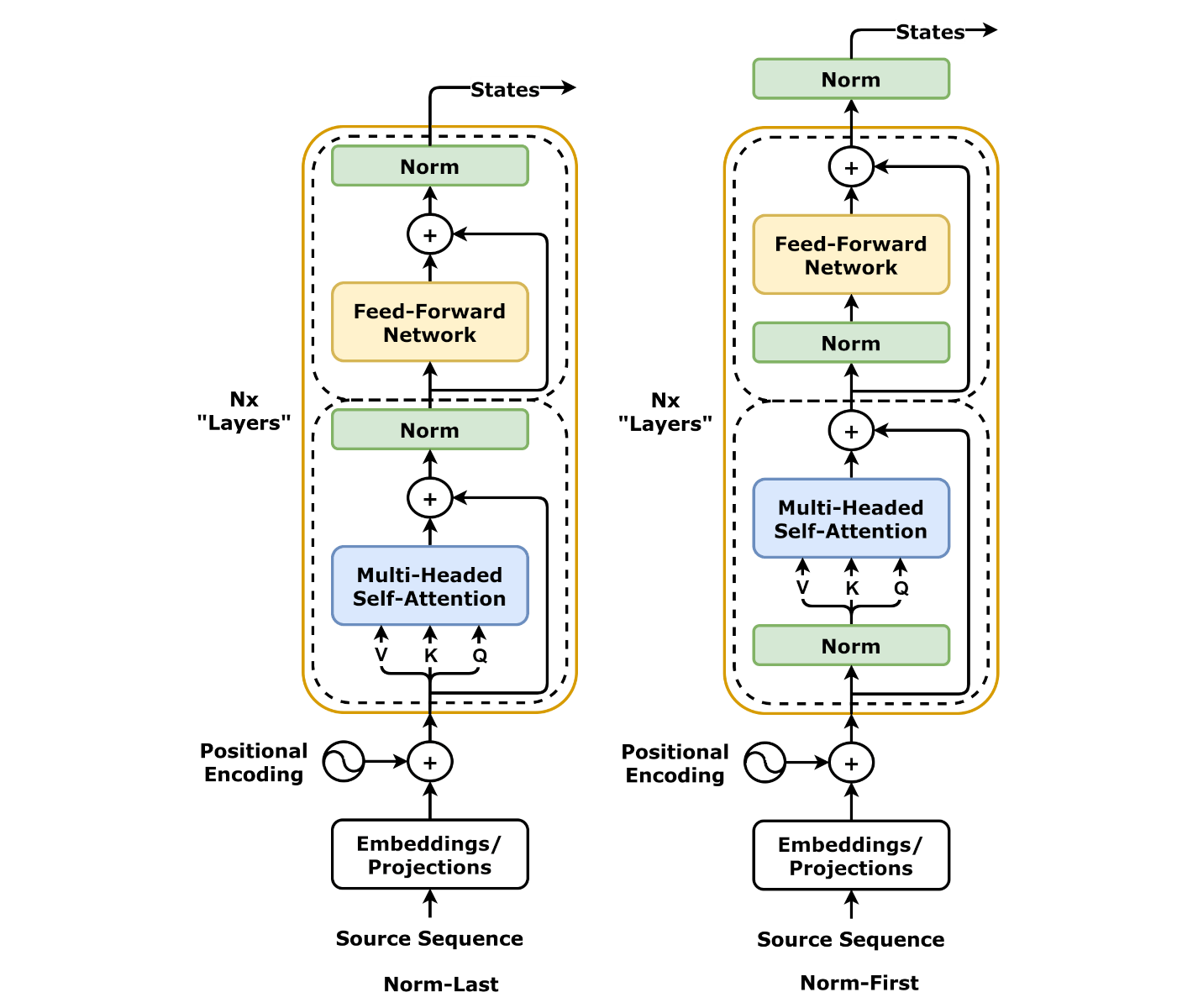
3.4. Stacking Encoders and Decoders¶
The output of one encoder feeds the next, and the last encoder outputs states as usual. These states will feed the cross-attention mechanism of all stacked decoders. The output of one decoder feeds the next, and the last decoder outputs predictions as usual.
The former encoder is now a so-called “layer”, and a stack of “layers” compose the new, deeper, encoder. The same holds true for the decoder. Moreover, each operation (multi-headed self- and cross-attention mechanisms and feed-forward networks) inside a “layer” is now a “sub-layer”.
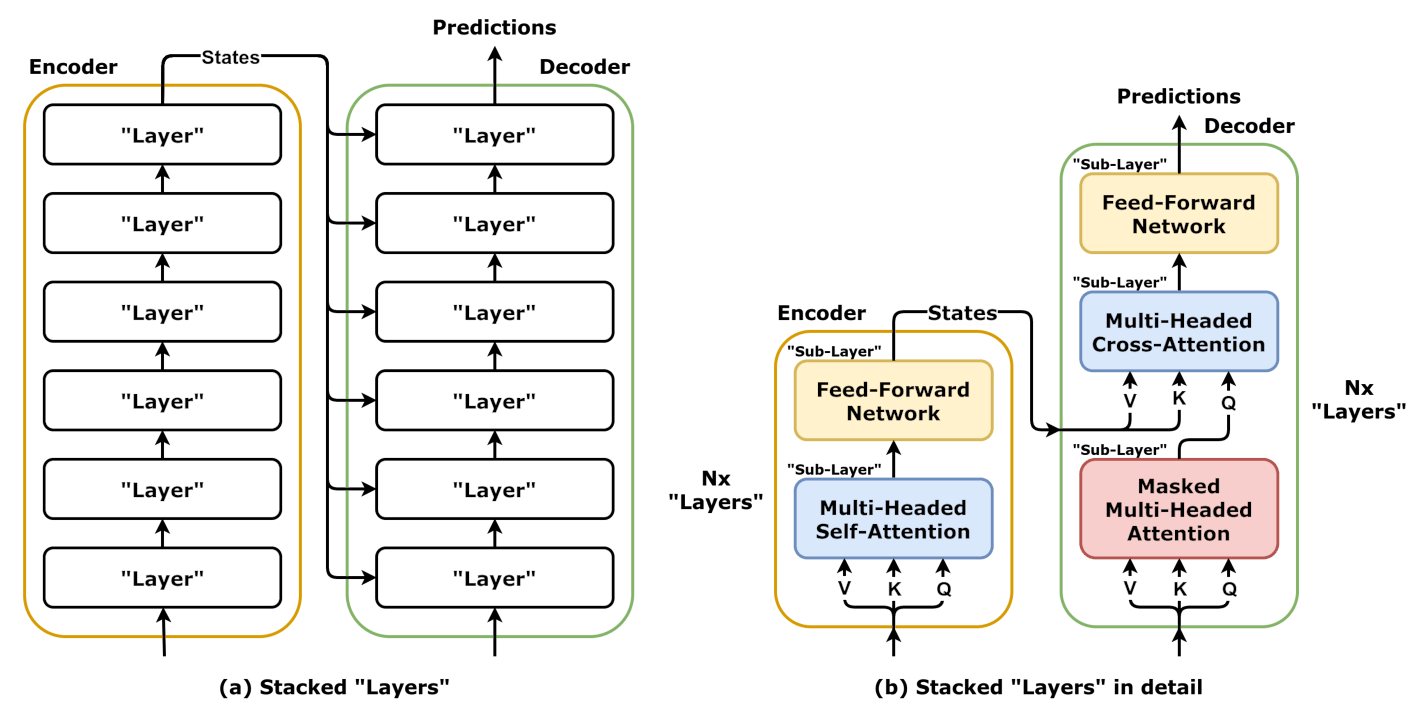
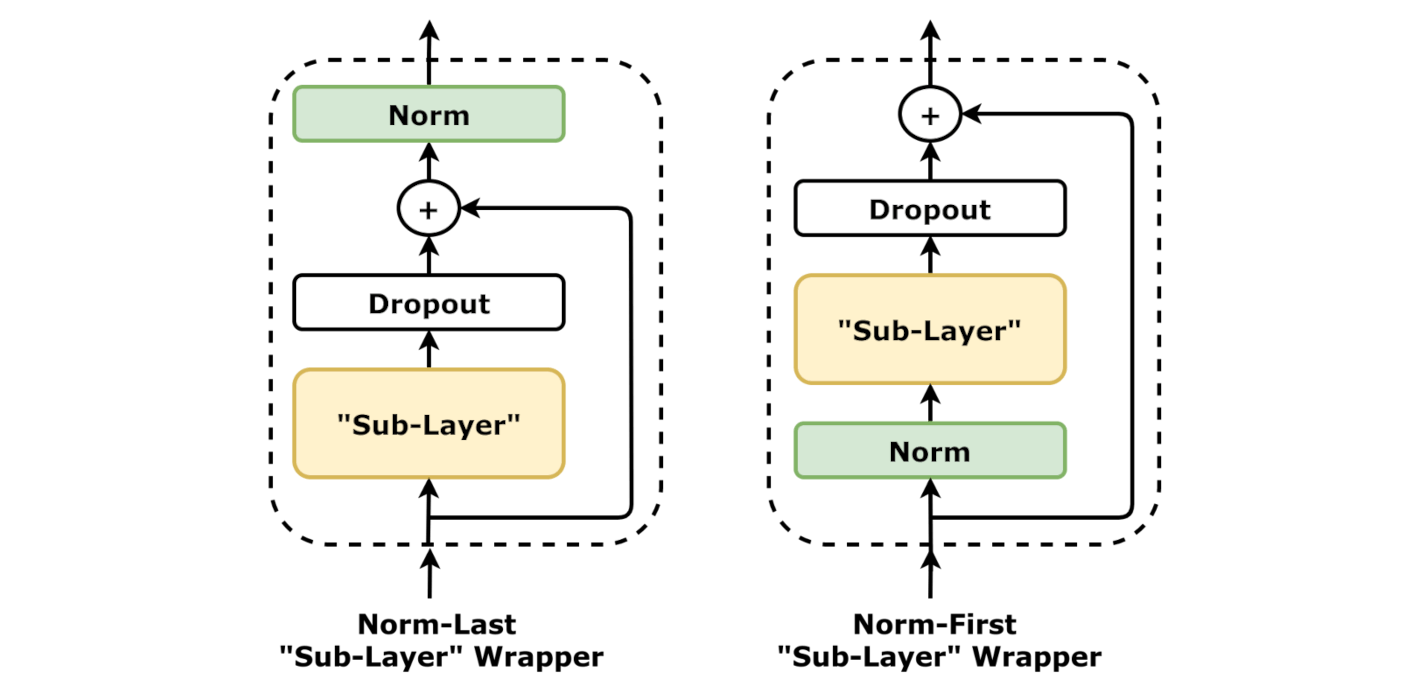
3.5. Wrapping “Sub-Layers”¶
As our models grows deeper with many stacked “layers”, we are running into familiar issues, like the vanishing gradients problem. we can add batch and layer normalization, residual connections, introduce dropout to our model. We can wrap each and every “sub-layer” with them in either a norm-first or norm-last manner.
3.6. Transformer Encoder¶
class EncoderLayer(nn.Module):
def __init__(self, n_heads, d_model, ff_units, dropout=0.1):
super().__init__()
self.n_heads = n_heads
self.d_model = d_model
self.ff_units = ff_units
self.self_attn_heads = MultiHeadedAttention(n_heads, d_model,
dropout=dropout)
self.ffn = nn.Sequential(
nn.Linear(d_model, ff_units),
nn.ReLU(),
nn.Dropout(dropout),
nn.Linear(ff_units, d_model),
)
self.norm1 = nn.LayerNorm(d_model)
self.norm2 = nn.LayerNorm(d_model)
self.drop1 = nn.Dropout(dropout)
self.drop2 = nn.Dropout(dropout)
def forward(self, query, mask=None):
# Sublayer #0
# Norm
norm_query = self.norm1(query)
# Multi-headed Attention
self.self_attn_heads.init_keys(norm_query)
states = self.self_attn_heads(norm_query, mask)
# Add
att = query + self.drop1(states)
# Sublayer #1
# Norm
norm_att = self.norm2(att)
# Feed Forward
out = self.ffn(norm_att)
# Add
out = att + self.drop2(out)
return out
class EncoderTransf(nn.Module):
def __init__(self, encoder_layer, n_layers=1, max_len=100):
super().__init__()
self.d_model = encoder_layer.d_model
self.pe = PositionalEncoding(max_len, self.d_model)
self.norm = nn.LayerNorm(self.d_model)
self.layers = nn.ModuleList([copy.deepcopy(encoder_layer)
for _ in range(n_layers)])
def forward(self, query, mask=None):
# Positional Encoding
x = self.pe(query)
for layer in self.layers:
x = layer(x, mask)
# Norm
return self.norm(x)
enclayer = nn.TransformerEncoderLayer(d_model=6, nhead=3, dim_feedforward=20)
enctransf = nn.TransformerEncoder(enclayer, num_layers=1, norm=nn.LayerNorm)
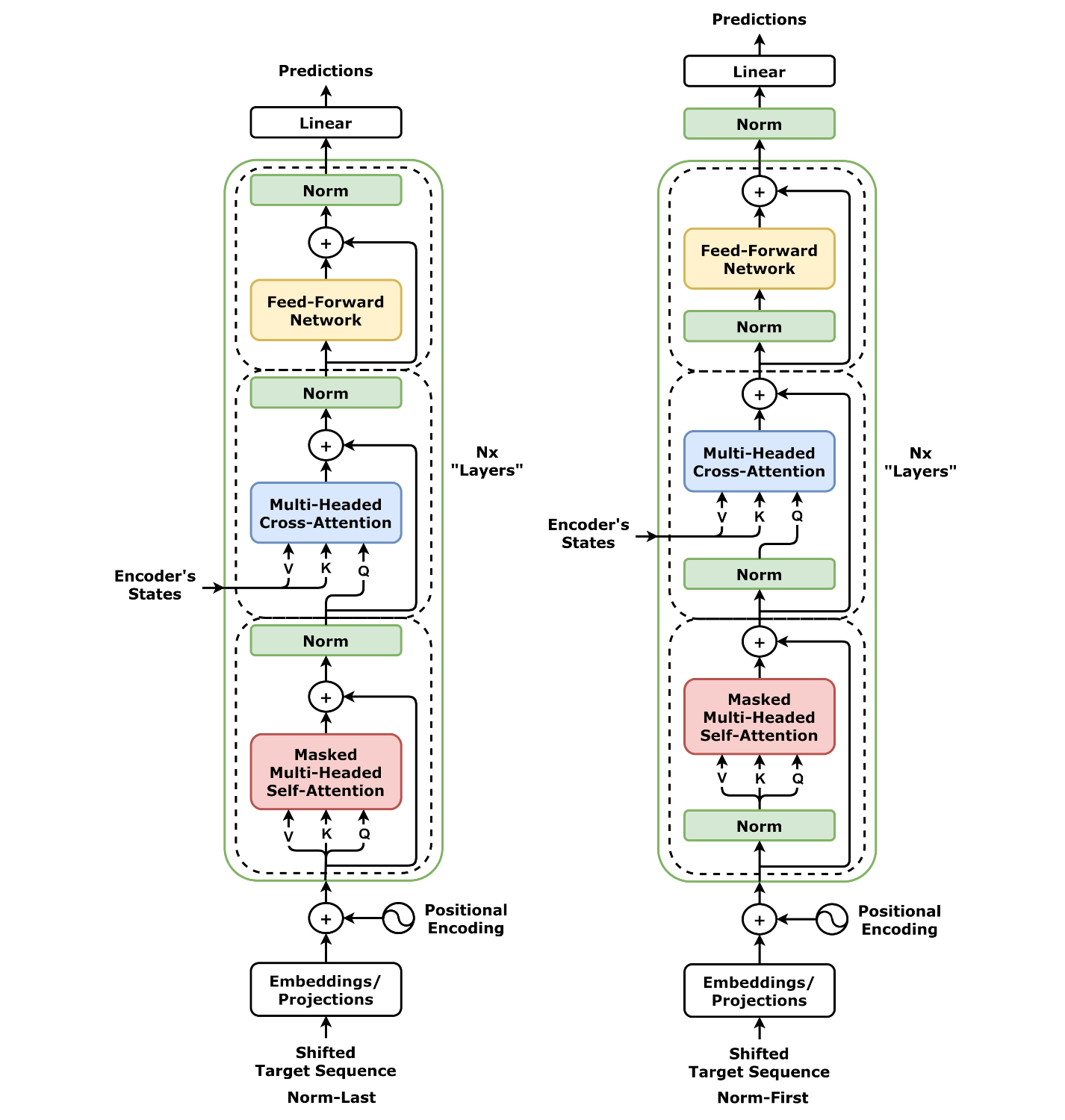
3.7. Transformer Decoder¶
class DecoderLayer(nn.Module):
def __init__(self, n_heads, d_model, ff_units, dropout=0.1):
super().__init__()
self.n_heads = n_heads
self.d_model = d_model
self.ff_units = ff_units
self.self_attn_heads = MultiHeadedAttention(n_heads, d_model,
dropout=dropout)
self.cross_attn_heads = MultiHeadedAttention(n_heads, d_model,
dropout=dropout)
self.ffn = nn.Sequential(
nn.Linear(d_model, ff_units),
nn.ReLU(),
nn.Dropout(dropout),
nn.Linear(ff_units, d_model),
)
self.norm1 = nn.LayerNorm(d_model)
self.norm2 = nn.LayerNorm(d_model)
self.norm3 = nn.LayerNorm(d_model)
self.drop1 = nn.Dropout(dropout)
self.drop2 = nn.Dropout(dropout)
self.drop3 = nn.Dropout(dropout)
def init_keys(self, states):
self.cross_attn_heads.init_keys(states)
def forward(self, query, source_mask=None, target_mask=None):
# Sublayer #0
# Norm
norm_query = self.norm1(query)
# Masked Multi-head Attention
self.self_attn_heads.init_keys(norm_query)
states = self.self_attn_heads(norm_query, target_mask)
# Add
att1 = query + self.drop1(states)
# Sublayer #1
# Norm
norm_att1 = self.norm2(att1)
# Multi-head Attention
encoder_states = self.cross_attn_heads(norm_att1, source_mask)
# Add
att2 = att1 + self.drop2(encoder_states)
# Sublayer #2
# Norm
norm_att2 = self.norm3(att2)
# Feed Forward
out = self.ffn(norm_att2)
# Add
out = att2 + self.drop3(out)
return out
class DecoderTransf(nn.Module):
def __init__(self, decoder_layer, n_layers=1, max_len=100):
super(DecoderTransf, self).__init__()
self.d_model = decoder_layer.d_model
self.pe = PositionalEncoding(max_len, self.d_model)
self.norm = nn.LayerNorm(self.d_model)
self.layers = nn.ModuleList([copy.deepcopy(decoder_layer)
for _ in range(n_layers)])
def init_keys(self, states):
for layer in self.layers:
layer.init_keys(states)
def forward(self, query, source_mask=None, target_mask=None):
# Positional Encoding
x = self.pe(query)
for layer in self.layers:
x = layer(x, source_mask, target_mask)
# Norm
return self.norm(x)
declayer = nn.TransformerDecoderLayer(d_model=6, nhead=3, dim_feedforward=20)
dectransf = nn.TransformerDecoder(declayer, num_layers=1, norm=nn.LayerNorm)
3.8. The Transformer¶
![]()
The Transformer still is an encoder-decoder architecture like the one we
developed in the previous chapter, so it should be no surprise that we can actually
use our former EncoderDecoderSelfAttn class as a parent class and add two extra
components to it:
a projection layer to map our original features (
n_features) to the dimensionality of both encoder and decoder (d_model)a final linear layer to map the decoder’s outputs back to the original feature space (the coordinates we’re trying to predict)
class EncoderDecoderSelfAttn(nn.Module):
def __init__(self, encoder, decoder, input_len, target_len):
super(EncoderDecoderSelfAttn, self).__init__()
self.encoder = encoder
self.decoder = decoder
self.input_len = input_len
self.target_len = target_len
self.trg_masks = self.subsequent_mask(self.target_len)
@staticmethod
def subsequent_mask(size):
attn_shape = (1, size, size)
subseque_mask = (1 - torch.triu(torch.ones(attn_shape), diagonal=1))
return subseque_mask
def encode(self, source_seq, source_mask):
encoder_states = self.encoder(source_seq, source_mask)
self.decoder.init_keys(encoder_states)
def decode(self, shifted_target_seq, source_mask=None, target_mask=None):
outputs = self.decoder(shifted_target_seq,
source_mask=source_mask,
target_mask=target_mask)
return outputs
def predict(self, source_seq, source_mask):
inputs = source_seq[:, -1:]
for i in range(self.target_len):
out = self.decode(inputs, source_mask, self.trg_masks[:, :i+1, :i+1])
out = torch.cat([inputs, out[:, -1:, :]], dim=-2)
inputs = out.detach()
outputs = inputs[:, 1:, :]
return outputs
def forward(self, X, source_mask=None):
self.trg_masks = self.trg_masks.type_as(X).bool()
source_seq = X[:, :self.input_len, :]
self.encode(source_seq, source_mask)
if self.training:
shifted_target_seq = X[:, self.input_len-1:-1, :]
outputs = self.decode(shifted_target_seq, source_mask, self.trg_masks)
else:
outputs = self.predict(source_seq, source_mask)
return outputs
class EncoderDecoderTransf(EncoderDecoderSelfAttn):
def __init__(self, encoder, decoder, input_len, target_len, n_features):
super(EncoderDecoderTransf, self).__init__(encoder, decoder, input_len, target_len)
self.n_features = n_features
self.proj = nn.Linear(n_features, encoder.d_model)
self.linear = nn.Linear(encoder.d_model, n_features)
def encode(self, source_seq, source_mask=None):
# Projection
source_proj = self.proj(source_seq)
encoder_states = self.encoder(source_proj, source_mask)
self.decoder.init_keys(encoder_states)
def decode(self, shifted_target_seq, source_mask=None, target_mask=None):
# Projection
target_proj = self.proj(shifted_target_seq)
outputs = self.decoder(target_proj,
source_mask=source_mask,
target_mask=target_mask)
# Linear
outputs = self.linear(outputs)
return outputs
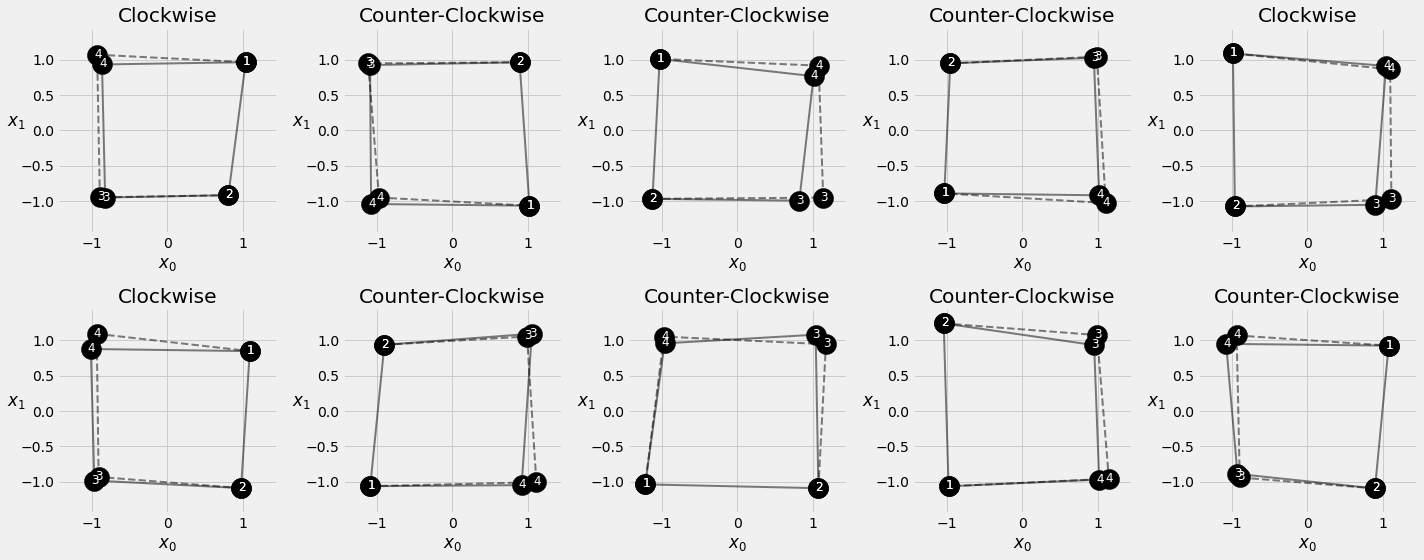
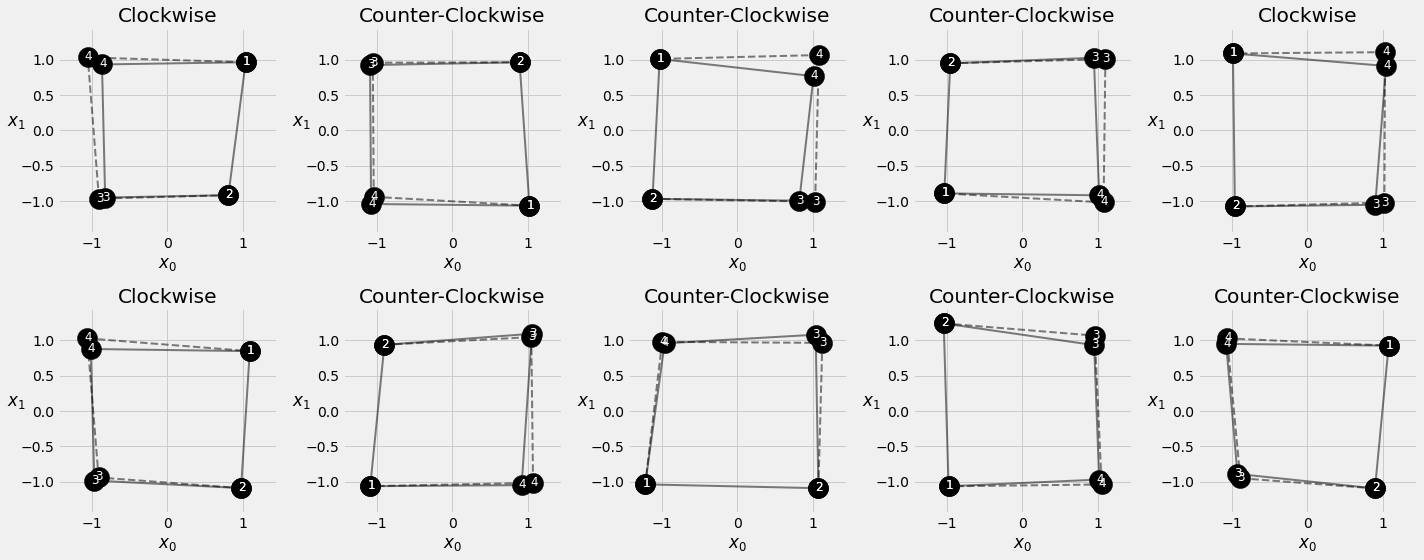
3.8.1. Data Preparation¶
def generate_sequences(n=128, variable_len=False, seed=13):
basic_corners = np.array([[-1, -1], [-1, 1], [1, 1], [1, -1]])
np.random.seed(seed)
bases = np.random.randint(4, size=n)
if variable_len:
lengths = np.random.randint(3, size=n) + 2
else:
lengths = [4] * n
directions = np.random.randint(2, size=n)
points = [basic_corners[[(b + i) % 4 for i in range(4)]][slice(None, None, d*2-1)][:l] + np.random.randn(l, 2) * 0.1 for b, d, l in zip(bases, directions, lengths)]
return points, directions
# Generating training data
points, directions = generate_sequences()
full_train = torch.as_tensor(points).float()
target_train = full_train[:, 2:]
# Generating test data
test_points, test_directions = generate_sequences(seed=17)
full_test = torch.as_tensor(points).float()
source_test = full_test[:, :2]
target_test = full_test[:, 2:]
# Datasets and data loaders
train_data = TensorDataset(full_train, target_train)
test_data = TensorDataset(source_test, target_test)
generator = torch.Generator()
train_loader = DataLoader(train_data, batch_size=16, shuffle=True, generator=generator)
test_loader = DataLoader(test_data, batch_size=16)
fig = plot_data(points, directions, n_rows=1)

3.8.2. Model Configuration & Training¶
torch.manual_seed(42)
# Layers
enclayer = EncoderLayer(n_heads=3, d_model=6, ff_units=10, dropout=0.1)
declayer = DecoderLayer(n_heads=3, d_model=6, ff_units=10, dropout=0.1)
# Encoder and Decoder
enctransf = EncoderTransf(enclayer, n_layers=2)
dectransf = DecoderTransf(declayer, n_layers=2)
# Transformer
model_transf = EncoderDecoderTransf(enctransf, dectransf, input_len=2, target_len=2, n_features=2)
loss = nn.MSELoss()
optimizer = torch.optim.Adam(model_transf.parameters(), lr=0.01)
for p in model_transf.parameters():
if p.dim() > 1:
nn.init.xavier_uniform_(p)
sbs_seq_transf = StepByStep(model_transf, loss, optimizer)
sbs_seq_transf.set_loaders(train_loader, test_loader)
sbs_seq_transf.train(50)
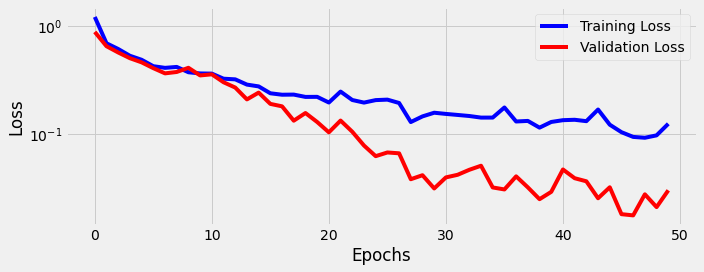
fig = sbs_seq_transf.plot_losses()
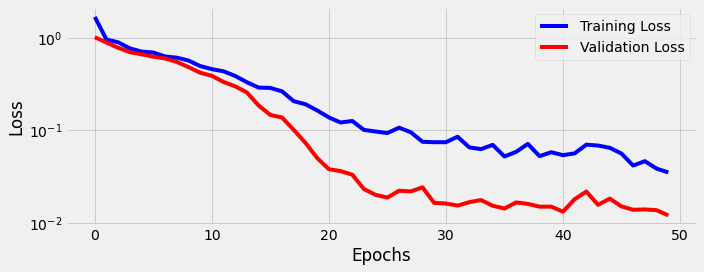
Note
Why is the validation loss so much better than the training loss? This phenomenon may happen for a variety of reasons, from an easier validation set to a “side effect” of regularization (e.g. dropout) in our current model. The regularization makes it harder for the model to learn or, in other words, yields higher losses. In our Transformer model, there are many dropout layers, so it gets increasingly more difficult for the model to learn.
Let’s observe this effect by using the same mini-batch to compute the loss using the trained model both in train and eval modes:
torch.manual_seed(11)
x, y = next(iter(train_loader))
device = sbs_seq_transf.device
# Training
model_transf.train()
loss(model_transf(x.to(device)), y.to(device))
tensor(0.0456, device='cuda:0', grad_fn=<MseLossBackward>)
# Validation
model_transf.eval()
loss(model_transf(x.to(device)), y.to(device))
tensor(0.0101, device='cuda:0')
The loss is roughly three times larger in training mode.
Your Turn
You can set dropout to zero and retrain the model to verify that both loss curves get much closer to each other (by the way, the overall loss level gets better without dropout, but that’s just because our sequence-to-sequence problem is actually quite simple).
3.8.3. Visualizing Predictions¶
fig = sequence_pred(sbs_seq_transf, full_test, test_directions)
3.9. The PyTorch Transformer¶
PyTorch implements a full-fledged Transformer class of its own:
nn.Transformer.
There are some differences between PyTorch’s implementation and our own:
first, and most importantly, PyTorch implements norm-last “sub-layer” wrappers, normalizing the output of each “sub-layer”
it does not implement positional encoding, the final linear layer, and the projection layer, so we have to handle those ourselves.
The constructor expects many arguments because PyTorch’s Transformer actually builds both encoder and decoder by itself.
def encode_decode(self, source, target, source_mask=None, target_mask=None):
# Projections
# PyTorch Transformer expects L, N, F
src = self.preprocess(source).permute(1, 0, 2)
tgt = self.preprocess(target).permute(1, 0, 2)
out = self.transf(src, tgt,
src_key_padding_mask=source_mask,
tgt_mask=target_mask)
# Linear
# Back to N, L, D
out = out.permute(1, 0, 2)
out = self.linear(out) # N, L, F
return out
class TransformerModel(nn.Module):
def __init__(self, transformer, input_len, target_len, n_features):
super().__init__()
self.transf = transformer
self.input_len = input_len
self.target_len = target_len
self.trg_masks = self.transf.generate_square_subsequent_mask(self.target_len)
self.n_features = n_features
self.proj = nn.Linear(n_features, self.transf.d_model)
self.linear = nn.Linear(self.transf.d_model, n_features)
max_len = max(self.input_len, self.target_len)
self.pe = PositionalEncoding(max_len, self.transf.d_model)
self.norm = nn.LayerNorm(self.transf.d_model)
def preprocess(self, seq):
seq_proj = self.proj(seq)
seq_enc = self.pe(seq_proj)
return self.norm(seq_enc)
def encode_decode(self, source, target, source_mask=None, target_mask=None):
# Projections
# PyTorch Transformer expects L, N, F
src = self.preprocess(source).permute(1, 0, 2)
tgt = self.preprocess(target).permute(1, 0, 2)
out = self.transf(src, tgt,
src_key_padding_mask=source_mask,
tgt_mask=target_mask)
# Linear
# Back to N, L, D
out = out.permute(1, 0, 2)
out = self.linear(out) # N, L, F
return out
def predict(self, source_seq, source_mask=None):
inputs = source_seq[:, -1:]
for i in range(self.target_len):
out = self.encode_decode(source_seq, inputs,
source_mask=source_mask,
target_mask=self.trg_masks[:i+1, :i+1])
out = torch.cat([inputs, out[:, -1:, :]], dim=-2)
inputs = out.detach()
outputs = out[:, 1:, :]
return outputs
def forward(self, X, source_mask=None):
self.trg_masks = self.trg_masks.type_as(X)
source_seq = X[:, :self.input_len, :]
if self.training:
shifted_target_seq = X[:, self.input_len-1:-1, :]
outputs = self.encode_decode(source_seq, shifted_target_seq,
source_mask=source_mask,
target_mask=self.trg_masks)
else:
outputs = self.predict(source_seq, source_mask)
return outputs
3.9.1. Model Configuration & Training¶
torch.manual_seed(42)
transformer = nn.Transformer(d_model=6, nhead=3,
num_encoder_layers=1, num_decoder_layers=1,
dim_feedforward=20, dropout=0.1)
model_transformer = TransformerModel(transformer, input_len=2, target_len=2, n_features=2)
loss = nn.MSELoss()
optimizer = torch.optim.Adam(model_transformer.parameters(), lr=0.01)
for p in model_transformer.parameters():
if p.dim() > 1:
nn.init.xavier_uniform_(p)
sbs_seq_transformer = StepByStep(model_transformer, loss, optimizer)
sbs_seq_transformer.set_loaders(train_loader, test_loader)
sbs_seq_transformer.train(50)
fig = sbs_seq_transformer.plot_losses()
3.9.2. Visualizing Predictions¶
fig = sequence_pred(sbs_seq_transformer, full_test, test_directions)