1. Positional Encoding¶
We loose positional information when using self-attention, as compared to RNNs with cross-attention. The idea of positional encoding is to capture the position information and use that to augument the input vectors.
Three key requirements of positional encoding vectors:
The values need to be bounded.
Each position should have its own vector. The same position should have the same values.
They need to be unique. No two positions should share the same encoding vectors.
The euclidean distance between two vectors needs to reflect the positional distance between the correponding two position indices. Take position
3for example, the vector distance between position1and3, needs to be the same as3and5, as both1and5are two positions away from3.
1.1. Helper Files¶
Download these files and place them in the same directory as the current notebook before you start.
from IPython.display import FileLink, FileLinks
FileLink('plots_transformer.py')
FileLink('util.py')
FileLink('replay.py')
1.2. Imports¶
import numpy as np
import torch
import torch.optim as optim
import torch.nn as nn
import torch.nn.functional as F
from torch.utils.data import DataLoader, Dataset, random_split, TensorDataset
from util import StepByStep
from plots_transformer import *
1.3. Angular Speed¶
1.3.1. Fixed Based Positional Encoding¶
Visualisation of base 4, 5 and 7. Each base corresponds to an angular speed of (\(\frac{360}{4}\),\(\frac{360}{5}\),\(\frac{360}{7}\)) per position, indicating how many degrees to move along the circle at each position. For example, at position 3, the corresponding degrees to move for each base is \(\frac{360}{4} *3\),\(\frac{360}{5} *3 \),\(\frac{360}{7} * 3\), respectively. We use sine and cosine of these degrees along a unit circle to get the position encodings. The values under each position index is a vector encode the position.
fig = encoding_degrees(dims=3, seqs=(4, 5, 7), tot=8)
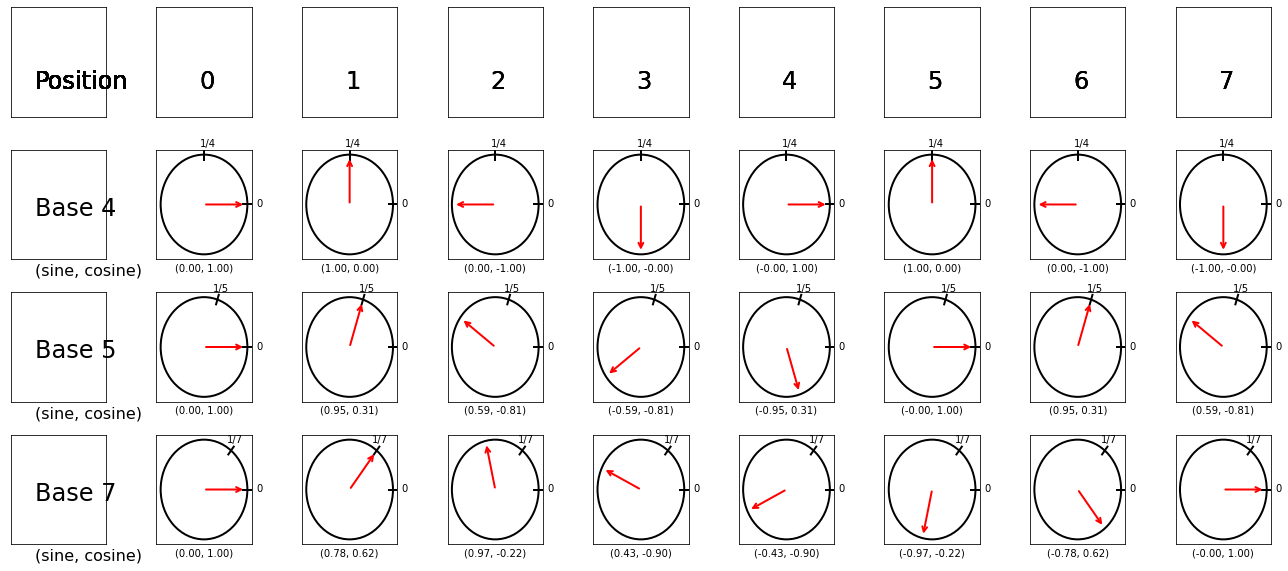
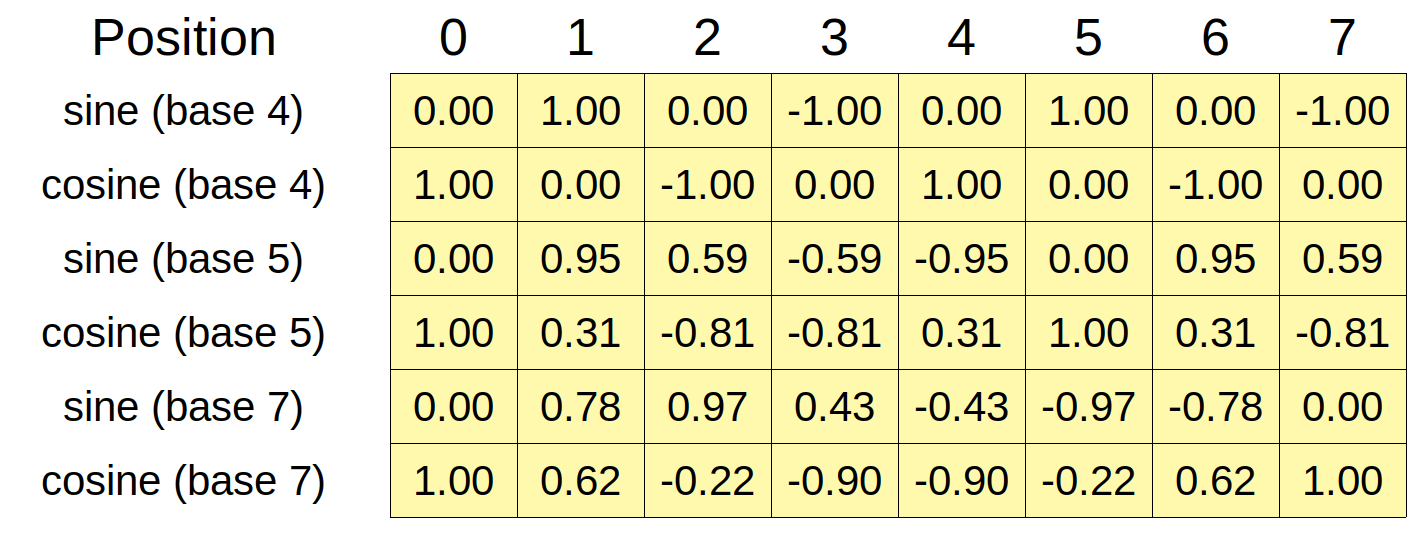
As shown above the position encoding above meets the requirements we listed above.
Your Turn
Implement a position encoding using the above bases (4,5,7), and verify the distance between positions is maintained by the positional encodings.
1.3.2. General Exponential Bases¶
In real implementation, we do not need to worry about choosing the right bases.
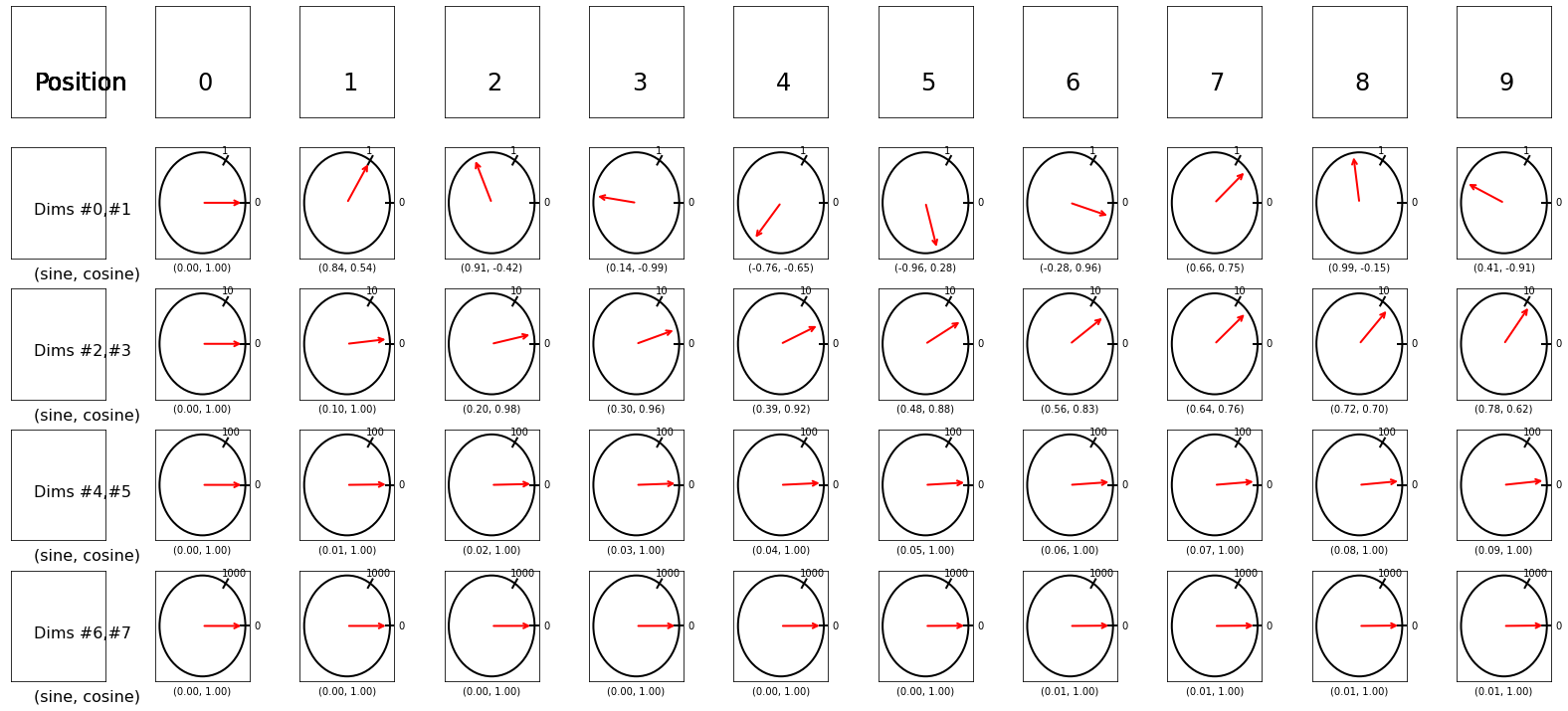
As the first vector, we can simply move along the circle as many radians as the index of the position (one radian is approximately \(\frac{360}{2\pi}=57.3\) degrees). Then, for each new vector we add to the encoding, we move along the circle with exponentially slower angular speeds. For example, in the second vector, we would move only one-tenth of a radian (approximately 5.73 degrees) for each new position. In the third vector we would move only one-hundredth of a radian, and so on and so forth. Figure below depicts the red arrow moving at increasingly slower angular speeds, for an eight dimensional positional encoding. For eight dimensions, we need four speeds and to get the four speeds, we can use the exponential power of 10000 like below to get speed multipliers (in this case, \([1, 0.1, 0.01, 0.001]\)). $\( \left(\frac{1}{10000^{\frac{0}{8}}}, \frac{1}{10000^{\frac{2}{8}}}, \frac{1}{10000^{\frac{4}{8}}}, \frac{1}{10000^{\frac{6}{8}}}\right)=(1, 0.1, 0.01, 0.001) \)$
fig = exponential_dials(d_model=8, max_len=10)
max_len = 10
d_model = 8
position = torch.arange(0, max_len).float().unsqueeze(1)
angular_speed = torch.exp(torch.arange(0, d_model, 2).float() * (-np.log(10000.0) / d_model))
encoding = torch.zeros(max_len, d_model)
encoding[:, 0::2] = torch.sin(angular_speed * position)
encoding[:, 1::2] = torch.cos(angular_speed * position)
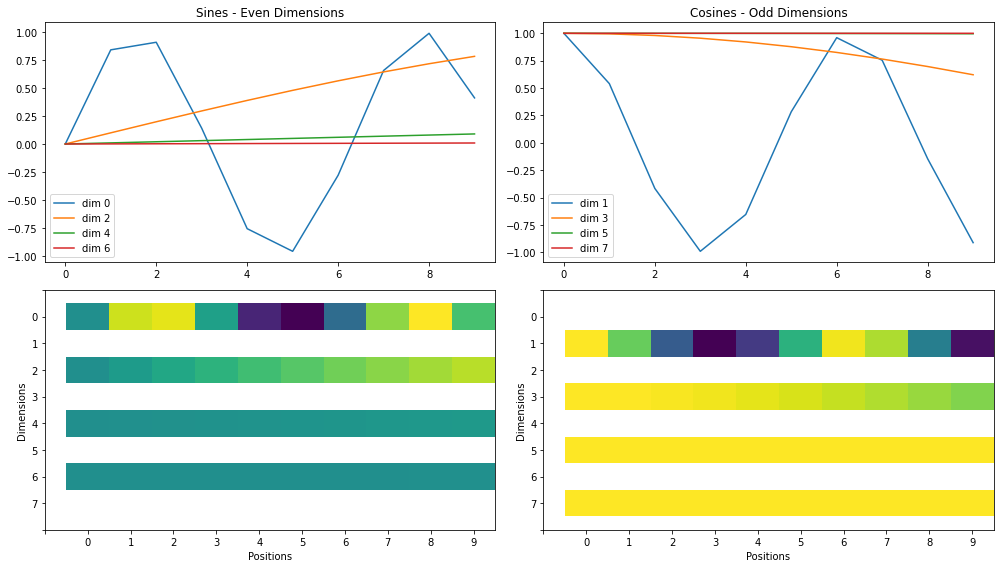
fig = encoding_heatmap(d_model=8, max_len=10)
np.round(encoding[0:4], 4) # first four positions
tensor([[ 0.0000, 1.0000, 0.0000, 1.0000, 0.0000, 1.0000, 0.0000, 1.0000],
[ 0.8415, 0.5403, 0.0998, 0.9950, 0.0100, 1.0000, 0.0010, 1.0000],
[ 0.9093, -0.4161, 0.1987, 0.9801, 0.0200, 0.9998, 0.0020, 1.0000],
[ 0.1411, -0.9900, 0.2955, 0.9553, 0.0300, 0.9996, 0.0030, 1.0000]])
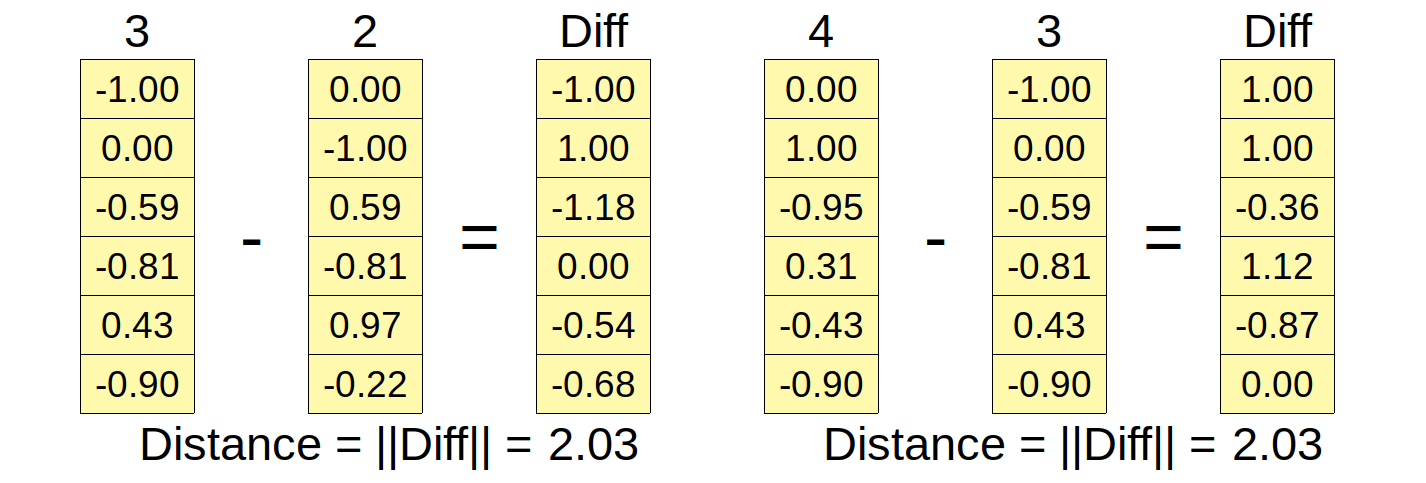
1.3.3. A Note on Encoded Distances¶
We have already seen:
the encoded distance is defined by the Euclidean distance between two vectors or, in other words, it is the norm (size) of the difference between two encoding vectors
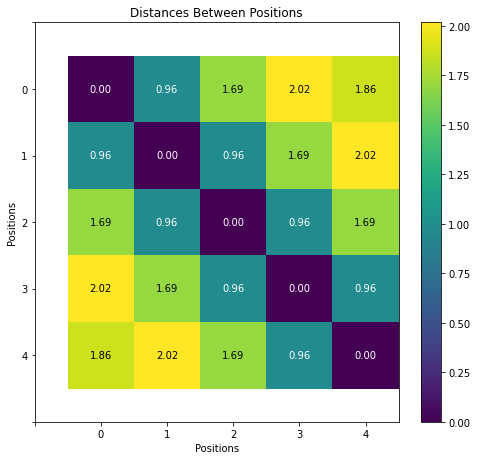
the encoded distance between positions zero and two (T=2) should be exactly the same as the encoded distance between positions one and three, two and four, and so on
In other words, the encoded distance between any two positions T steps apart remains constant. Let’s illustrate this by computing the encoded distances among the first five positions (by the way, we are using the encoding with eight dimensions.)
distances = np.zeros((5, 5))
for i, v1 in enumerate(encoding[:5]):
for j, v2 in enumerate(encoding[:5]):
distances[i, j] = np.linalg.norm(v1 - v2)
fig, ax = plt.subplots(1, 1, figsize=(7, 6.5))
ax.set_title('Distances Between Positions')
fig = plot_mesh(distances, ax, showvals=True, colorbar=True, ylabel='Positions')
1.4. The positional encoding class¶
There is a couple of things about this class to highlight:
in the constructor, it uses
register_bufferto define an attribute of the modulein the forward method, it is scaling the input before adding the positional encoding
1.4.1. register_buffer¶
Important
register_buffer
The register_buffer is used to define an attribute that is part of the module’s
state, yet not a parameter. In other words, it is the recorded in state_dict but is not updated or tracked by the dynamic computational graph for gradient calculation.
The positional encoding is a good example: its values are computed according to the dimension and length used by the model, and even though these values are going to be used during training, they shouldn not be updated by gradient descent.
class PositionalEncoding(nn.Module):
def __init__(self, max_len, d_model):
super().__init__()
self.d_model = d_model
pe = torch.zeros(max_len, d_model)
position = torch.arange(0, max_len).float().unsqueeze(1)
angular_speed = torch.exp(torch.arange(0, d_model, 2).float() * (-np.log(10000.0) / d_model))
pe[:, 0::2] = torch.sin(position * angular_speed) # even dimensions
pe[:, 1::2] = torch.cos(position * angular_speed) # odd dimensions
self.register_buffer('pe', pe.unsqueeze(0))
def forward(self, x):
# x is N, L, D
# pe is 1, maxlen, D
scaled_x = x * np.sqrt(self.d_model)
encoded = scaled_x + self.pe[:, :x.size(1), :]
return encoded
1.4.2. Reverse Input Scaling¶
Warning
“crowded-out” effect As shown below, the original coordinates are “crowded-out” by the addition of the positional encoding (especially the first row). This may happen if the data points have values roughly in the same range as the positional encoding.
Unfortunately, this is fairly common: both standardized inputs and word
embeddings are likely to have most of their values inside the [-1, 1] range of the positional encoding.
Note
“How can we handle “crowded-out”?” The scaling in the forward method “reverses the standardization” of the inputs (using a standard deviation equals the square root of their dimensionality) to retrieve the hypothetical “raw” inputs.
posenc = PositionalEncoding(2, 2)
list(posenc.parameters()), posenc.state_dict()
([],
OrderedDict([('pe', tensor([[[0.0000, 1.0000],
[0.8415, 0.5403]]]))]))
posenc.pe
tensor([[[0.0000, 1.0000],
[0.8415, 0.5403]]])
full_seq = torch.tensor([[-1, -1], [-1, 1], [1, 1], [1, -1]]).float().view(1, 4, 2)
source_seq = full_seq[:, :2]
target_seq = full_seq[:, 2:]
source_seq # 1, L, D
tensor([[[-1., -1.],
[-1., 1.]]])
source_seq + posenc.pe
tensor([[[-1.0000, 0.0000],
[-0.1585, 1.5403]]])
posenc(source_seq)
tensor([[[-1.4142, -0.4142],
[-0.5727, 1.9545]]])
The results above (after the encoding) illustrate the effect of scaling the inputs: it seems to have lessened the crowding-out effect of the positional encoding.
Warning
Reverse standardisation is bad for the model, when the input dimension is large
For inputs with many dimensions, the effect of reverse standardisation will be much more pronounced: a 300-dimensions embedding will have a scaling factor around 17, for example. Another normalization trick: layer normalization, will counter-act it.
1.5. Encoder and Decoder with Self Attention¶
These are the same code we have seen earlier in the Week 12 lab.
class Attention(nn.Module):
def __init__(self, hidden_dim, input_dim=None, proj_values=False):
super().__init__()
self.d_k = hidden_dim
self.input_dim = hidden_dim if input_dim is None else input_dim
self.proj_values = proj_values
# Affine transformations for Q, K, and V
self.linear_query = nn.Linear(self.input_dim, hidden_dim)
self.linear_key = nn.Linear(self.input_dim, hidden_dim)
self.linear_value = nn.Linear(self.input_dim, hidden_dim)
self.alphas = None
def init_keys(self, keys):
self.keys = keys
self.proj_keys = self.linear_key(self.keys)
self.values = self.linear_value(self.keys) \
if self.proj_values else self.keys
def score_function(self, query):
proj_query = self.linear_query(query)
# scaled dot product
# N, 1, H x N, H, L -> N, 1, L
dot_products = torch.bmm(proj_query, self.proj_keys.permute(0, 2, 1))
scores = dot_products / np.sqrt(self.d_k)
return scores
def forward(self, query, mask=None):
# Query is batch-first N, 1, H
scores = self.score_function(query) # N, 1, L
if mask is not None:
scores = scores.masked_fill(mask == 0, -1e9)
alphas = F.softmax(scores, dim=-1) # N, 1, L
self.alphas = alphas.detach()
# N, 1, L x N, L, H -> N, 1, H
context = torch.bmm(alphas, self.values)
return context
class MultiHeadAttention(nn.Module):
def __init__(self, n_heads, d_model, input_dim=None, proj_values=True):
super().__init__()
self.linear_out = nn.Linear(n_heads * d_model, d_model)
self.attn_heads = nn.ModuleList([Attention(d_model,
input_dim=input_dim,
proj_values=proj_values)
for _ in range(n_heads)])
def init_keys(self, key):
for attn in self.attn_heads:
attn.init_keys(key)
@property
def alphas(self):
# Shape: n_heads, N, 1, L (source)
return torch.stack([attn.alphas for attn in self.attn_heads], dim=0)
def output_function(self, contexts):
# N, 1, n_heads * D
concatenated = torch.cat(contexts, axis=-1)
# Linear transf. to go back to original dimension
out = self.linear_out(concatenated) # N, 1, D
return out
def forward(self, query, mask=None):
contexts = [attn(query, mask=mask) for attn in self.attn_heads]
out = self.output_function(contexts)
return out
class EncoderSelfAttn(nn.Module):
def __init__(self, n_heads, d_model, ff_units, n_features=None):
super().__init__()
self.n_heads = n_heads
self.d_model = d_model
self.ff_units = ff_units
self.n_features = n_features
self.self_attn_heads = MultiHeadAttention(n_heads, d_model, input_dim=n_features)
self.ffn = nn.Sequential(
nn.Linear(d_model, ff_units),
nn.ReLU(),
nn.Linear(ff_units, d_model),
)
def forward(self, query, mask=None):
self.self_attn_heads.init_keys(query)
att = self.self_attn_heads(query, mask)
out = self.ffn(att)
return out
class DecoderSelfAttn(nn.Module):
def __init__(self, n_heads, d_model, ff_units, n_features=None):
super().__init__()
self.n_heads = n_heads
self.d_model = d_model
self.ff_units = ff_units
self.n_features = d_model if n_features is None else n_features
self.self_attn_heads = MultiHeadAttention(n_heads, d_model, input_dim=self.n_features)
self.cross_attn_heads = MultiHeadAttention(n_heads, d_model)
self.ffn = nn.Sequential(
nn.Linear(d_model, ff_units),
nn.ReLU(),
nn.Linear(ff_units, self.n_features),
)
def init_keys(self, states):
self.cross_attn_heads.init_keys(states)
def forward(self, query, source_mask=None, target_mask=None):
self.self_attn_heads.init_keys(query)
att1 = self.self_attn_heads(query, target_mask)
att2 = self.cross_attn_heads(att1, source_mask)
out = self.ffn(att2)
return out
1.6. Encoder + Decoder + PE¶
The new encoder and decoder classes are just wrapping their self-attention
counterparts by assigning the latter as the layer attribute (self.layer) of the former, and encoding the inputs prior to calling the corresponding layer in the forward() method:
class EncoderPe(nn.Module):
def __init__(self, n_heads, d_model, ff_units, n_features=None, max_len=100):
super().__init__()
pe_dim = d_model if n_features is None else n_features
self.pe = PositionalEncoding(max_len, pe_dim)
self.layer = EncoderSelfAttn(n_heads, d_model, ff_units, n_features)
def forward(self, query, mask=None):
query_pe = self.pe(query)
out = self.layer(query_pe, mask)
return out
class DecoderPe(nn.Module):
def __init__(self, n_heads, d_model, ff_units, n_features=None, max_len=100):
super().__init__()
pe_dim = d_model if n_features is None else n_features
self.pe = PositionalEncoding(max_len, pe_dim)
self.layer = DecoderSelfAttn(n_heads, d_model, ff_units, n_features)
def init_keys(self, states):
self.layer.init_keys(states)
def forward(self, query, source_mask=None, target_mask=None):
query_pe = self.pe(query)
out = self.layer(query_pe, source_mask, target_mask)
return out
class EncoderDecoderSelfAttn(nn.Module):
def __init__(self, encoder, decoder, input_len, target_len):
super().__init__()
self.encoder = encoder
self.decoder = decoder
self.input_len = input_len
self.target_len = target_len
self.trg_masks = self.subsequent_mask(self.target_len)
@staticmethod
def subsequent_mask(size):
attn_shape = (1, size, size)
subsequent_mask = (1 - torch.triu(torch.ones(attn_shape), diagonal=1))
return subsequent_mask
def encode(self, source_seq, source_mask):
# Encodes the source sequence and uses the result
# to initialize the decoder
encoder_states = self.encoder(source_seq, source_mask)
self.decoder.init_keys(encoder_states)
def decode(self, shifted_target_seq, source_mask=None, target_mask=None):
# Decodes/generates a sequence using the shifted (masked)
# target sequence - used in TRAIN mode
outputs = self.decoder(shifted_target_seq,
source_mask=source_mask,
target_mask=target_mask)
return outputs
def predict(self, source_seq, source_mask):
# Decodes/generates a sequence using one input
# at a time - used in EVAL mode
inputs = source_seq[:, -1:]
for i in range(self.target_len):
out = self.decode(inputs, source_mask, self.trg_masks[:, :i+1, :i+1])
out = torch.cat([inputs, out[:, -1:, :]], dim=-2)
inputs = out.detach()
outputs = inputs[:, 1:, :]
return outputs
def forward(self, X, source_mask=None):
# Sends the mask to the same device as the inputs
self.trg_masks = self.trg_masks.type_as(X).bool()
# Slices the input to get source sequence
source_seq = X[:, :self.input_len, :]
# Encodes source sequence AND initializes decoder
self.encode(source_seq, source_mask)
if self.training:
# Slices the input to get the shifted target seq
shifted_target_seq = X[:, self.input_len-1:-1, :]
# Decodes using the mask to prevent cheating
outputs = self.decode(shifted_target_seq, source_mask, self.trg_masks)
else:
# Decodes using its own predictions
outputs = self.predict(source_seq, source_mask)
return outputs
1.7. Data Preparation¶
def generate_sequences(n=128, variable_len=False, seed=13):
basic_corners = np.array([[-1, -1], [-1, 1], [1, 1], [1, -1]])
np.random.seed(seed)
bases = np.random.randint(4, size=n)
if variable_len:
lengths = np.random.randint(3, size=n) + 2
else:
lengths = [4] * n
directions = np.random.randint(2, size=n)
points = [basic_corners[[(b + i) % 4 for i in range(4)]][slice(None, None, d*2-1)][:l] + np.random.randn(l, 2) * 0.1 for b, d, l in zip(bases, directions, lengths)]
return points, directions
points, directions = generate_sequences()
full_train = torch.as_tensor(points).float()
target_train = full_train[:, 2:]
test_points, test_directions = generate_sequences(seed=19)
full_test = torch.as_tensor(points).float()
source_test = full_test[:, :2]
target_test = full_test[:, 2:]
train_data = TensorDataset(full_train, target_train)
test_data = TensorDataset(source_test, target_test)
generator = torch.Generator()
train_loader = DataLoader(train_data, batch_size=16, shuffle=True, generator=generator)
test_loader = DataLoader(test_data, batch_size=16)
1.8. Model Configuration & Training¶
torch.manual_seed(43)
encpe = EncoderPe(n_heads=3, d_model=2, ff_units=10, n_features=2)
decpe = DecoderPe(n_heads=3, d_model=2, ff_units=10, n_features=2)
model = EncoderDecoderSelfAttn(encpe, decpe, input_len=2, target_len=2)
loss = nn.MSELoss()
optimizer = optim.Adam(model.parameters(), lr=0.01)
sbs_seq_selfattnpe = StepByStep(model, loss, optimizer)
sbs_seq_selfattnpe.set_loaders(train_loader, test_loader)
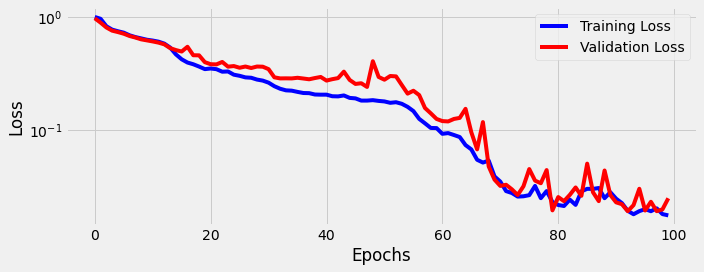
sbs_seq_selfattnpe.train(100)
fig = sbs_seq_selfattnpe.plot_losses()
1.9. Visualizing Results¶
1.9.1. Visualizing Predictions¶
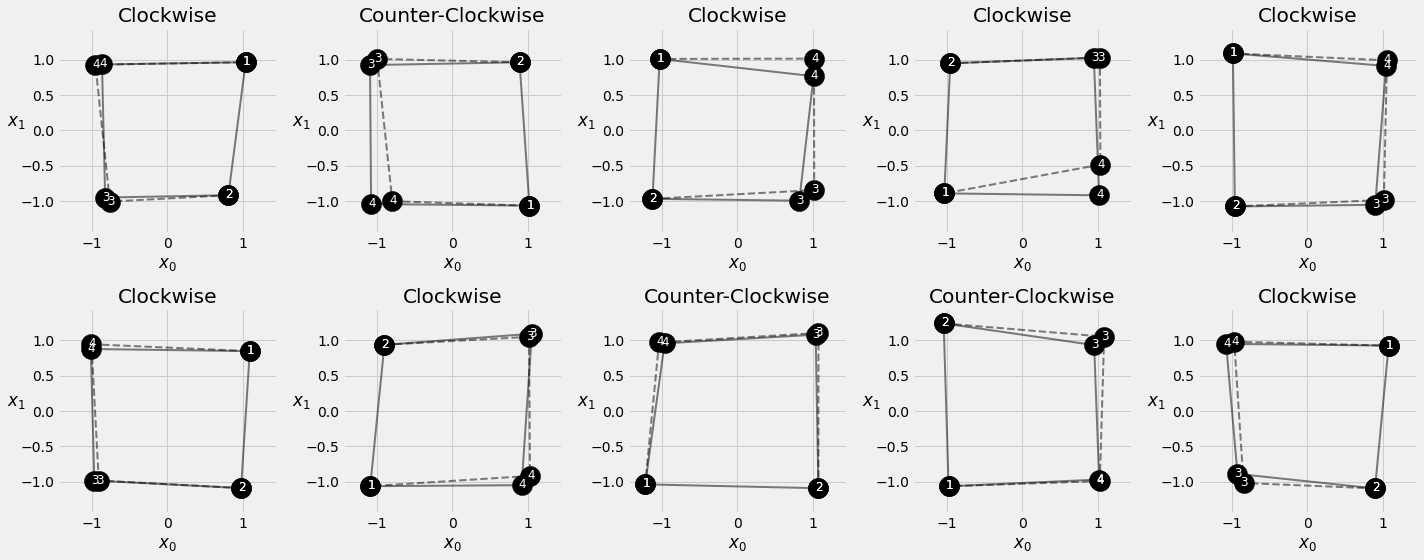
fig = sequence_pred(sbs_seq_selfattnpe, full_test, test_directions)
1.9.2. Visualizing Attention¶
inputs = full_test[:2, :2]
source_labels = ['Point #1', 'Point #2']
target_labels = ['Point #3', 'Point #4']
point_labels = [f'{"Counter-" if not directions[i] else ""}Clockwise\nPoint #1: {inp[0, 0]:.2f}, {inp[0, 1]:.2f}' for i, inp in enumerate(inputs)]
fig = plot_attention(model, inputs, point_labels, source_labels, target_labels, decoder=False, self_attn=True, alphas_attr='encoder.layer.self_attn_heads.alphas')
fig.suptitle('Encoder Self-Attention')
fig.subplots_adjust(top=0.85)
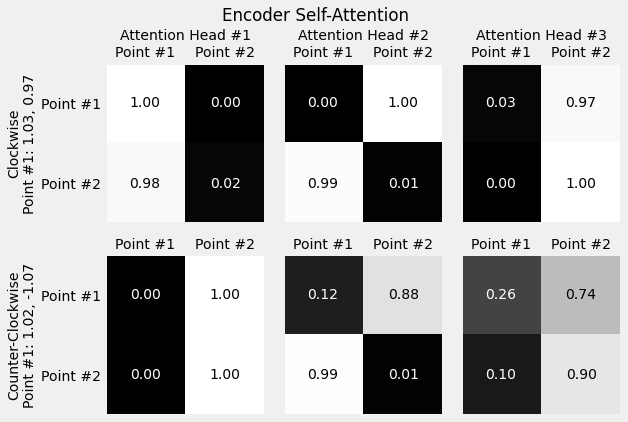
fig = plot_attention(model, inputs, point_labels, source_labels, target_labels,
decoder=True, self_attn=True, alphas_attr='decoder.layer.self_attn_heads.alphas')
fig.suptitle('Decoder Self-Attention')
fig.subplots_adjust(top=0.85)
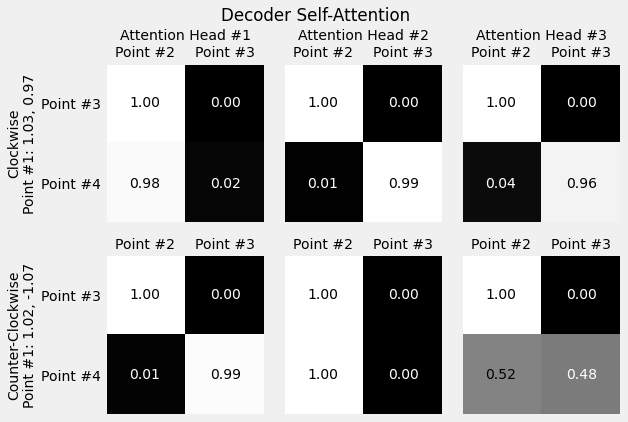
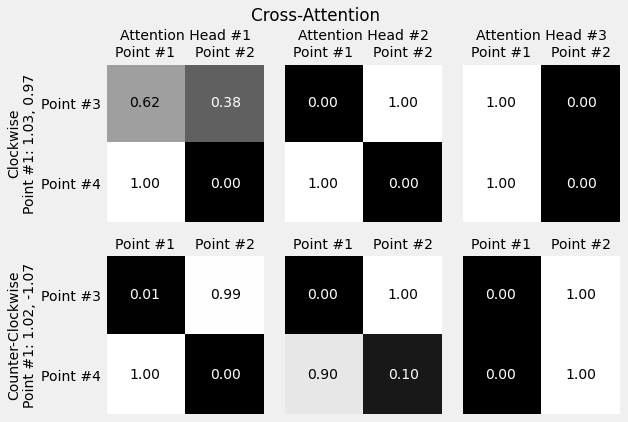
fig = plot_attention(model, inputs, point_labels, source_labels, target_labels, self_attn=False, alphas_attr='decoder.layer.cross_attn_heads.alphas')
fig.suptitle('Cross-Attention')
fig.subplots_adjust(top=0.85)